Compensation
C'est un processus permettant d’obtenir les valeurs les plus probables d’altitude à partir d’observations surabondantes de dénivelées géométriques ou de différences d’altitude.
Pour compenser les réseaux de référence, on utilise la méthode des moindres carrés. Pour les opérations de densification et d’entretien, ce procédé consiste à répartir l’écart de fermeture des cheminements en fonction de la distance, du nombre de nivelées ou de la dénivelée.
Synonyme : ajustement
La théorie des statistiques
Derrière le concept de 'compensation' ou d'ajustement de réseau se trouve la théorie des statistiques et, plus particulièrement, la méthode des moindres carrés.
La compensation par moindres carrés d'observations de terrain est une étape capitale en géodésie. Lorsqu'elle est réalisée dans les règles de l'art, elle permet d'isoler les fautes dans les observations et fournit la précision et la fiabilité des coordonnées déterminées.
Les éléments en entrée du calcul sont les mesures et les incertitudes qui leur sont associées. Ces observations contiennent des erreurs dues aux limitations des instruments de mesure et à l'influence des opérateurs. De ce fait, les boucles ne se referment pas parfaitement et conduisent à des valeurs différentes pour les coordonnées d'un même point du réseau.
Le but d'un ajustement par moindres carrés est de produire un jeu d'observations pour lequel toutes les boucles ferment à la perfection. Une seule valeur pourra alors être calculée pour chaque coordonnée du réseau. Pour ce faire, les observations doivent être légèrement changées, c'est à dire compensées. Elles ne doivent toutefois pas être fortement modifiées car elles restent la réalité observée sur le terrain.
Mais les observations contiennent des erreurs qui peuvent être prévues à partir de la précision intrinsèque des instruments utilisés. Pour que ce traitement soit réussi, les observations doivent être changées le moins possible et sa quantité, sur une observation donnée, doit être comprise dans les limites attendues pour l'instrument concerné et pour les conditions rencontrées sur le terrain.
 . Elles ne doivent toutefois pas être fortement modifiées car elles restent la réalité observée sur le terrain.
. Elles ne doivent toutefois pas être fortement modifiées car elles restent la réalité observée sur le terrain.Malheureusement, beaucoup d'obstacles peuvent empêcher de réussir cette opération. En premier lieu, les fautes grossières, qui sont des erreurs dues à un mauvais fonctionnement de l'appareil ou de l'opérateur (par exemple une hauteur d'appareil mal mesurée, une mauvaise identification d'un point stationné, etc.). Il existe des outils d'analyse qui peuvent surmonter ces obstacles avant et pendant le traitement. Ils sont, pour la plupart, basés sur les théories statistiques. Pour cette raison, il est essentiel que l'estimation des erreurs a priori soit la plus réaliste possible. Parfois ces incertitudes sont un peu trop optimistes (valeurs trop petites) ou pessimistes (valeur trop élevées). Là encore, il existe des méthodes qui aident à identifier les incertitudes irréalistes.
Les lois de la statistique demandent aussi qu'il y ait redondance dans les observations (il doit y avoir plus d'observations que d'inconnues) : ceci doit être pris en compte lors de la préparation du schéma d'observation.
Les statistiques et la méthode des moindres carrés
 Les statistiques sont une méthode scientifique pour réunir, classer, résumer, présenter, analyser et tirer des conclusions valides à partir de données. Les données statistiques regroupent des données numériques, des mesures ou des observations d'un phénomène naturel ou des résultats d'expériences. Une variable est une quantité qui peut avoir n'importe quelle valeur d'un ensemble prédéfini. En général, le résultat d'une mesure est une variable continue, ce qui signifie qu'elle peut prendre n'importe quelle valeur dans un intervalle défini.
Les statistiques sont une méthode scientifique pour réunir, classer, résumer, présenter, analyser et tirer des conclusions valides à partir de données. Les données statistiques regroupent des données numériques, des mesures ou des observations d'un phénomène naturel ou des résultats d'expériences. Une variable est une quantité qui peut avoir n'importe quelle valeur d'un ensemble prédéfini. En général, le résultat d'une mesure est une variable continue, ce qui signifie qu'elle peut prendre n'importe quelle valeur dans un intervalle défini.
La méthode des moindres carrés permet d'obtenir des valeurs uniques pour des paramètres physiques (par exemple : l'altitude de repères de nivellement) à partir de mesures redondantes de ces paramètres ou de quantités qui leur sont liées (par exemple : angles et distances permettent de déterminer des coordonnées géographiques).
Sa première utilisation est généralement attribuée à Karl Friedrich Gauss qui, en 1795, estima par cette méthode le mouvement orbital des planètes à partir de mesures réalisées avec un télescope. Dans son ouvrage "Theoria Motus Corporum Coelestium", publié en 1809, il présente les concepts selon lesquels les modèles mathématiques peuvent être incomplets et les mesures physiques contradictoires. Tout ce qu'on peut espérer obtenir à partir de ces mesures sont donc des estimations de la vérité. Les mesures redondantes serviront à réduire les effets des divergences.
En 1832, il publia la méthode des moindres carrés en connexion avec le concept des erreurs minimales possibles.
De nos jours, la méthode a réalisé tout son potentiel grâce aux développements effectués dans trois autres domaines : les concepts de la théorie moderne d'estimation statistique, les calculs matriciels et l'utilisation d'ordinateurs toujours plus performants.
Les quantités physiques ne peuvent jamais être mesurées parfaitement. Il y aura toujours une limite dans la précision des mesures au-delà de laquelle le modèle mathématique ou la résolution des instruments de mesures échoueront. Au-delà de cette précision limite, les mesures redondantes donneront des résultats différents et, donc, contradictoires.
Par exemple, si nous mesurons la longueur d'une table plusieurs fois avec un mètre à ruban et notre globe oculaire, la précision limite sera de l'ordre du millimètre. Si nous enregistrons nos mesures en arrondissant au centimètre, elles seront toutes identiques.
Mais la précision que nous désirons se trouve parfois au-delà de la précision limite de nos mesures. Dans ce cas, nous ne pouvons pas connaître la vraie valeur de notre quantité physique (par exemple la longueur de la table). Nous pouvons, au mieux, en calculer une estimation. Mais, pour que cette estimation soit unique, elle doit être déterminée par une méthode standard qui donnera toujours le même résultat à partir des mêmes mesures. Mais nous voulons aussi avoir une idée de la qualité de l'estimation.
Les méthodes scientifiques permettant de gérer des données contradictoires sont appelées des méthodes statistiques. Les méthodes permettant de déterminer des estimations uniques en même temps que leur qualité sont appelées des méthodes d'estimation statistique.
La méthode des moindres carrés est l'une d'entre elles. Basée sur la minimisation de la somme des carrés des divergences, elle est devenue standard dans de nombreux domaines.
Mais, pour pouvoir l'appliquer, il faut d'abord traduire le problème dans le langage des mathématiques, en établissant la relation entre les observables (quantités observées) et les paramètres (quantités recherchées). Cette relation est appelée le modèle mathématique.
Le modèle mathématique
Considérons le système d'équations linéaires f(X,L)=0, ou sous forme matricielle l'équation (1) :AX=L
où X est le vecteur des inconnues, L est le vecteur des constantes, A est la matrice des coefficients (en anglais design matrix).
Supposons que les éléments de L soient le résultat de mesures physiques. L est alors appelé le vecteur observation.
Dans le cas où il n'y a pas de redondance (nombre de mesures réduit au minimum), la matrice A est carrée, n'est pas singulière, et la matrice inverse existe. La solution unique est alors donnée par :

Lorsqu'il y a des observations (et donc des équations) redondantes, le système est surdéterminé. A n'est pas une matrice carrée, mais ATA l'est, et les mathématiques donnent la solution suivante :

Ceci n'est vrai que si le système est cohérent. Mais s'il y a des mesures redondantes, elles ne seront pas cohérentes entre elles parce que les mesures physiques ne sont jamais parfaites. Nous devons supposer qu'il y a des erreurs dans la détermination des observations. Ceci nous fait plonger dans la théorie des erreurs et les statistiques. Une compensation devient nécessaire dès lors que les données disponibles excèdent le minimum requis pour une détermination unique des paramètres.
Nous devons alors tout d'abord nous débarrasser des erreurs systématiques (par exemple l'allongement du ressort d'un gravimètre) et des fautes (erreurs grossières). Il existe de nombreuses manières de prendre en compte les erreurs systématiques et les fautes. Il faut retenir que, même après avoir éliminé ces erreurs, il reste encore une dispersion inévitable dans les observations : les erreurs aléatoires ou accidentelles. Pour prendre ces erreurs en compte, nous devons utiliser des concepts statistiques.
Bien qu'il n'existe pas de solution unique, une estimation unique peut en être faite. la méthode la plus répandue pour s'assurer de l'unicité de l'estimation est celle des moindres carrés. Les statistiques peuvent également servir à établir le degré de confiance de la solution et, ainsi, à définir la solution unique la plus probable.
Pour annuler les divergences, un vecteur doit être ajouter à l'équation (1) qui devient l'équation (2) :AX-L=Vdans laquelle V est généralement appelé vecteur des résidus. Les éléments de V ne sont pas connus et doivent être déterminés en même temps que les autres quantités inconnues. Certains éléments de L doivent alors pouvoir changer légèrement pour rechercher la solution X. L doit être considéré comme une valeur approchée d'une autre valeur ^L qui donnera une solution unique ^X (^ indique une quantité estimée). Rappelons que le critère des moindres carrés indique que la meilleure estimation pour X est celle qui va minimiser la somme des carrés des résidus (écarts entre les observations et les valeurs estimées assignées à chaque observable). C'est à dire l'estimation pour laquelle ^X est minimum. L'estimation ^X ainsi obtenue est l'estimation par les moindres carrés.
La différence entre la valeur observée et toute autre valeur calculée ou choisie arbitrairement est appelée erreur de fermeture (en anglais misclosure). Elle est différente du résidu (déterminé de manière unique par la différence entre l'observation et la moyenne de l'échantillon). Les moindres carrés ont une limite : les paramètres qui composent X doivent être supposés indépendants les uns des autres et les erreurs aléatoires supposées suivre une fonction de distribution de probabilité normale.
La pondération
Souvent, les mesures physiques ou expérimentales qui nous fournissent les éléments du vecteur L n'ont pas la même précision (elles ont été effectuées en utilisant des instruments différents, par des gens différents, dans des conditions différentes, etc.). Ces différences doivent être intégrées dans le processus d'estimation par moindres carrés, en affectant un poids connu à chaque mesure. P sera la matrice des poids (matrice qui a ces poids pour éléments). Cela revient à modifier le critère précédent, qui devient ^V. P ^V est minimum.
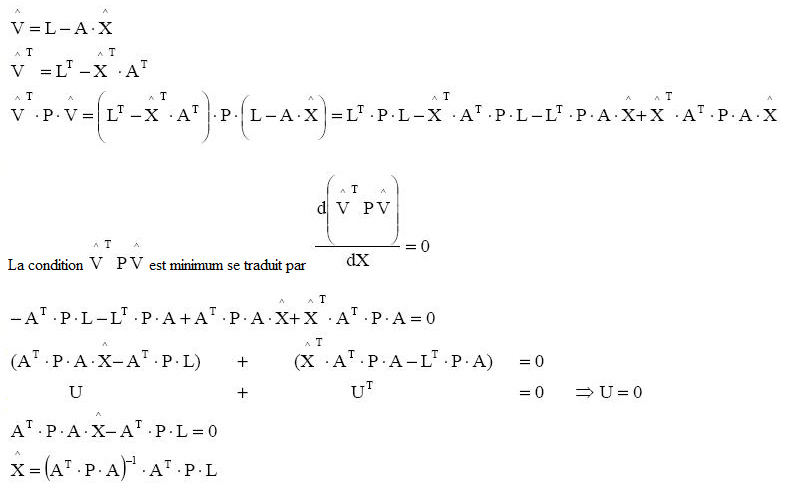
L'estimation qui en résulte est appelée estimation pondérée par moindres carrés et est donnée par l'équation (3) :
ATPA est la matrice de l'équation normale et la condition pour que l'estimation soit unique est que cette matrice ne soit pas singulière.
Démonstration
Il existe d'autres difficultés, qui apparaissent lorsque les fonctions du modèle mathématique ne sont pas linéaires. Le modèle doit être linéarisé avant de pouvoir lui appliquer la méthode des moindres carrés.
D'un point de vue pratique, l'inversion et la multiplication de grandes matrices requiert un nombre considérable d'étapes de calcul. Seule l'utilisation d'ordinateurs puissants et de méthodes adaptées permet de calculer des solutions pour de grands systèmes d'équations dans des délais raisonnables.
Supposons maintenant qu'il y a n observations et u paramètres inconnus. le processus de compensation par moindres carrés ne peut être appliqué que lorsqu'il y a des mesures redondantes, c'est à dire lorsque n > u. La quantité (n-u) est appelée redondance ou nombre de degrés de liberté.
Jusqu'ici, le choix de matrice des poids n'a pas été spécifié. Sa construction fera intervenir les écarts-types et les variances associées aux observations expérimentales, ainsi que leurs covariances.
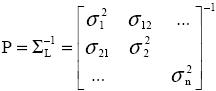
Moins une observation est précise, plus sa variance est grande. Un plus grand poids doit donc être accordé aux observations de plus petites variances. Ainsi, un choix raisonnable pour la matrice des poids est :

Les variances se trouvent sur la diagonale, et les covariances permettent de remplir le reste de la matrice. Les variances et les covariances doivent donc être connues avant de pouvoir réaliser une estimation par moindres carrés. Ces valeurs viennent d'une bonne connaissance des instruments et des procédures de mesure utilisés. La covariance d'une paire d'observations est une mesure de leur interdépendance statistique.
En pratique, les covariances d'un réseau de nivellement sont souvent supposées nulles, car les valeurs des observations ne sont pas corrélées. Par contre, pour la compensation d'un réseau GPS, les covariances ne sont pas nulles et doivent être prises en compte.
Il est souvent possible d'assigner des valeurs relatives de variances et de covariances. Dans ce cas, ΣL n'est connu qu'à un facteur d'échelle près. L'équation (3) donne alors la matrice de covariance relative Q, mais pas le facteur de variance

Il est cependant facile de démontrer que, dans cette équation, le facteur de variance s'élimine et, donc, que P ou Q-1 donnent la même estimation.
La matrice des poids est donc choisie pour être proportionnelle à l'inverse de la matrice de covariance estimée des observations. Comme le montre l'équation (3), le facteur utilisé pour calculer P n'influencera pas le résultat ^X.
La matrice des poids permet donc de prendre en compte les qualités variables des données. Si toutes les données se valaient, la matrice des poids pourrait être remplacée par la matrice identité.
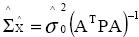
De même, l'estimateur non biaisé par les moindres carrés de la matrice de covariance de X est donné par l'équation (4) :
Bibliographie
Ce document est basé sur les sources suivantes :
- - Petr Vanícek and Edward J. Krakiwsky, Elsevier, "Geodesy, the Concepts", Second Edition
- - D. E. Wells and E. J. Krakiwsky, "The method of least squares [Lecture Notes n°18]" by Department of Surveying Engineering, University of New Brunswick, Fredericton, Canada and its "External Appendix: Numerical Examples on Interval Estimation and Hypothesis Testing"
- - Petr Vanícek, "Introduction to Adjustment Calculus (Third Revised Edition) [Lecture Notes n°35]" , Department of Surveying Engineering, University of New Brunswick, Fredericton, Canada
- - A. Kleusberg, "Notes for SE 2101 Theory of Measurements", Department of Surveying Engineering, University of New Brunswick, Fredericton, Canada
- - Edward M. Mikhail and F. Ackerman, "Observations and Least Squares" ,A Dun-Donneley Publisher, New York
- - Guide Utilisateur du logiciel "Ashtech Solutions".
Mis à jour le 09/07/2012







